Les voyageurs
ETAPE 1 :
PROBLÉMATIQUE n°1 :
où positionner notre capteur de couleur pour optimiser le suivi d'une ligne ?
Contraintes : Le capteur de couleur doit être entre 3 mm et 10 mm du sol pour fonctionner correctement.
A) Hypothèses : nous pensons qu'il faut mettre le capteur devant le robot car il doit savoir la couleur sur laquelle il va passer sinon il pourrait commencer à rouler dans du sable et s'en rendre compte trop tard.
B) Essais :
Faire des essais pour chaque hypothèse. Insérer des vidéos et des photos
C) En fonction des contraintes de la piste (vide) proposer un emplacement pour le capteur de couleur sous forme de conclusion : Présenter cette solution sous forme de schéma.
entre 3mm et 10 mm
ETAPE 2 :
PROBLÉMATIQUE n°2:
Comment rendre notre futur robot le plus maniable et stable possible ?
Réaliser le programme suivant Pour faire vos essais:
-Avancer à pleine vitesse pendant 3 rotations avec le frein pour s'arrêter.
-Reculer pendant 2 rotations avec les freins pour s'arrêter.
-Avancer pendant 2 rotations à pleine vitesse
-Faire un virage serré (une roue bloquée) à environ 90°à droite puis à gauche à plein vitesse.
-Faire une rotation sur place d'environ 360°
A) Hypothèse :
Nous pensons que le triangle approprié pour notre robot est un triangle isocèle avec les roues un peu écartées
pour rendre une meilleur stabilisation et la brique basse pour avoir un centre de gravité bas
B) Essais :
1er essai : utilisation d'un triangle équilatéral de 11cm de côté et la brique haute
le robot est bien maniable et assez stable
note : 4/5 :
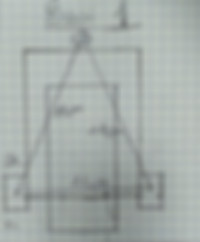

schéma robot : dessous robot :
2e essai : utilisation d'un triangle isocèle avec la brique plus basse
le robot est assez maniable et bien stable
note : 3/5


schéma robot : dessous robot :
3e essai : utilisation d'un triangle isocèle avec la brique haute
le robot est assez maniable et stable note : 2.5/5


schéma robot : dessous robot :
4e essai : utilisation d'un triangle isocèle avec la brique plus basse
le robot est maniable et bien stable
note : 3.5/5 :


schéma robot : dessous robot :
conclusion : La meilleur disposition pour notre robot est un triangle isocèle avec les roues un peu écartées pour une meilleure stabilisation et la brique basse pour un centre de gravité bas .
![IMG_3665[1]_edited.jpg](https://static.wixstatic.com/media/149d72_8e032afec2b6446f8f9875cd5ab236c7~mv2.jpg/v1/crop/x_0,y_310,w_3000,h_1630/fill/w_124,h_67,al_c,q_80,usm_0.66_1.00_0.01,blur_2,enc_auto/IMG_3665%5B1%5D_edited.jpg)
ETAPE 3 : Réalisation du prototype du châssis
CONTRAINTES :
Le triangle entre les roues et le bille est un triangle isocèle.
La brique se situe vers le bas au centre pour une bonne stabilité.
Le capteur couleur est devant le robot à gauche.
Le capteur ultrason se situe à l'avant.
Le 3e Moteur est sur le devant.
le capteur de contact est à l'avant .
DÉMARCHE :

conception du schéma du châssis

premier schéma de notre châssis

conception du site internet
Solution :
Nous avons donc décidé que notre châssis aura un triangle isocèle et que la brique sera incrustée dans le châssis.


prototype du châssis avec le robot
prototype du châssis final
ETAPE 4 : réalisation du châssis

mise en plan du châssis :

Usinage de notre châssis :


châssis réalisé sur Onshape :

Fin de l'usinage de notre pièce :

Usinage de notre châssis :